005.激光雷达的原理与RViz观测传感器
1. 激光雷达的原理
雷达的种类有很多种, 按照测量维度可以分为单线雷达和多线雷达.
按照测量原理可以分为三角雷达和TOF雷达
...
我们以最简单的TOF雷达作为例子:
| ##container## |
|---|
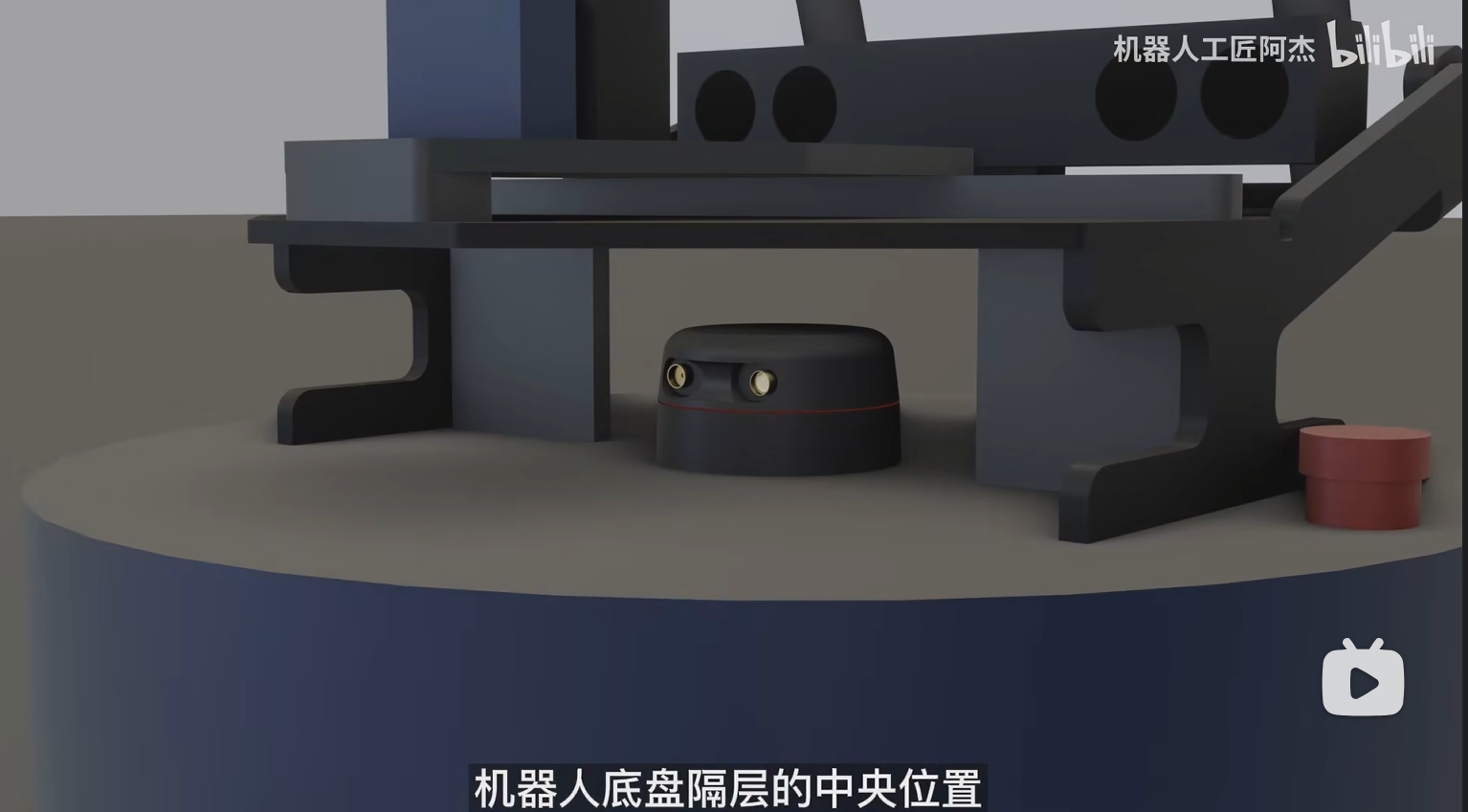 |
| 雷达通常安装的位置 |
雷达上有激光发射器和激光接收器;
工作过程:
- 激光发射器发射一道红外激光, 碰到障碍物反射回来, 被激光接收器捕获.
-
测量完一个方向, 雷达会旋转, 继续发射一道红外激光...
-
直到旋转一周, 就完成了一次对周围的探测, 所以只要旋转频率足够高, 就可以实时探测到周围的情况
2. RViz观测传感器
先打开仿真
roslaunch wpr_simulation wpb_simple.launch
再打开RViz观测传感器, (控制台输入:)
rviz
可以自己设置, 然后保存为配置文件, 可以配合的配置到launch里面(教程没有教)
| ##container## |
|---|
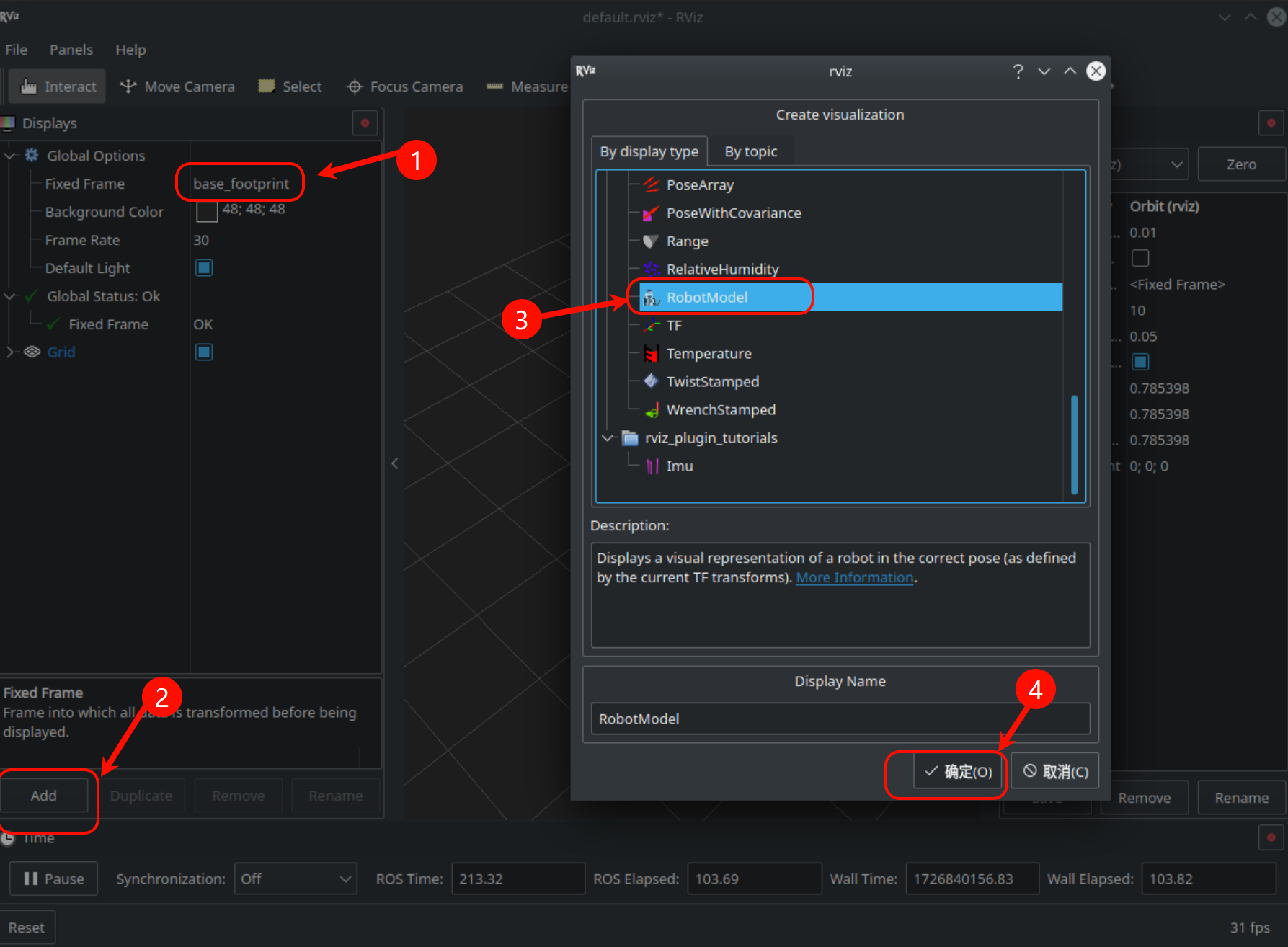 |
| 添加一个机器人(信息从仿真中来) |
懒人配置:
roslaunch wpr_simulation wpb_rviz.launch
如果破烂机器人是红色的, 我也不理了...反正它是存在的就行了

