012.TF系统与里程计在激光雷达的应用
1. TF系统
TF(Transform Framework)系统是ROS(机器人操作系统)中的一个库,用于处理和管理机器人坐标系之间的变换关系。它允许用户在不同的坐标框架中进行位置和姿态的转换,支持实时的坐标变换查询。TF系统通过维护变换树,确保可以在任意时间查询任意两个坐标系之间的关系,从而简化了多传感器数据融合、导航和控制等任务的实现。
roslaunch wpr_simulation wpb_hector.launch
| ##container## |
|---|
 |
1.1 消息包格式
TF消息通常使用以下数据包格式来表示坐标变换。主要的数据类型是 geometry_msgs/TransformStamped 和 tf2_msgs/TFMessage。
-
geometry_msgs/TransformStamped:
header: 消息的时间戳和坐标框架ID。seq: 消息序列号。stamp: 时间戳。frame_id: 父坐标系的ID。
child_frame_id: 子坐标系的ID。transform: 包含变换信息的结构体。translation: 表示平移的向量。x: x轴的平移量。y: y轴的平移量。z: z轴的平移量。
rotation: 表示旋转的四元数。x: 四元数x分量。y: 四元数y分量。z: 四元数z分量。w: 四元数w分量。
-
tf2_msgs/TFMessage:
transforms: 由多个TransformStamped组成的数组,表示一系列的坐标变换。
以下是一个简单的TF消息示例:
header:
seq: 1
stamp:
secs: 1633641000
nsecs: 0
frame_id: "base_link"
child_frame_id: "camera_link"
transform:
translation:
x: 0.1
y: 0.0
z: 0.5
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
这种格式使得机器人能够实时地维护和查询不同坐标系之间的关系。
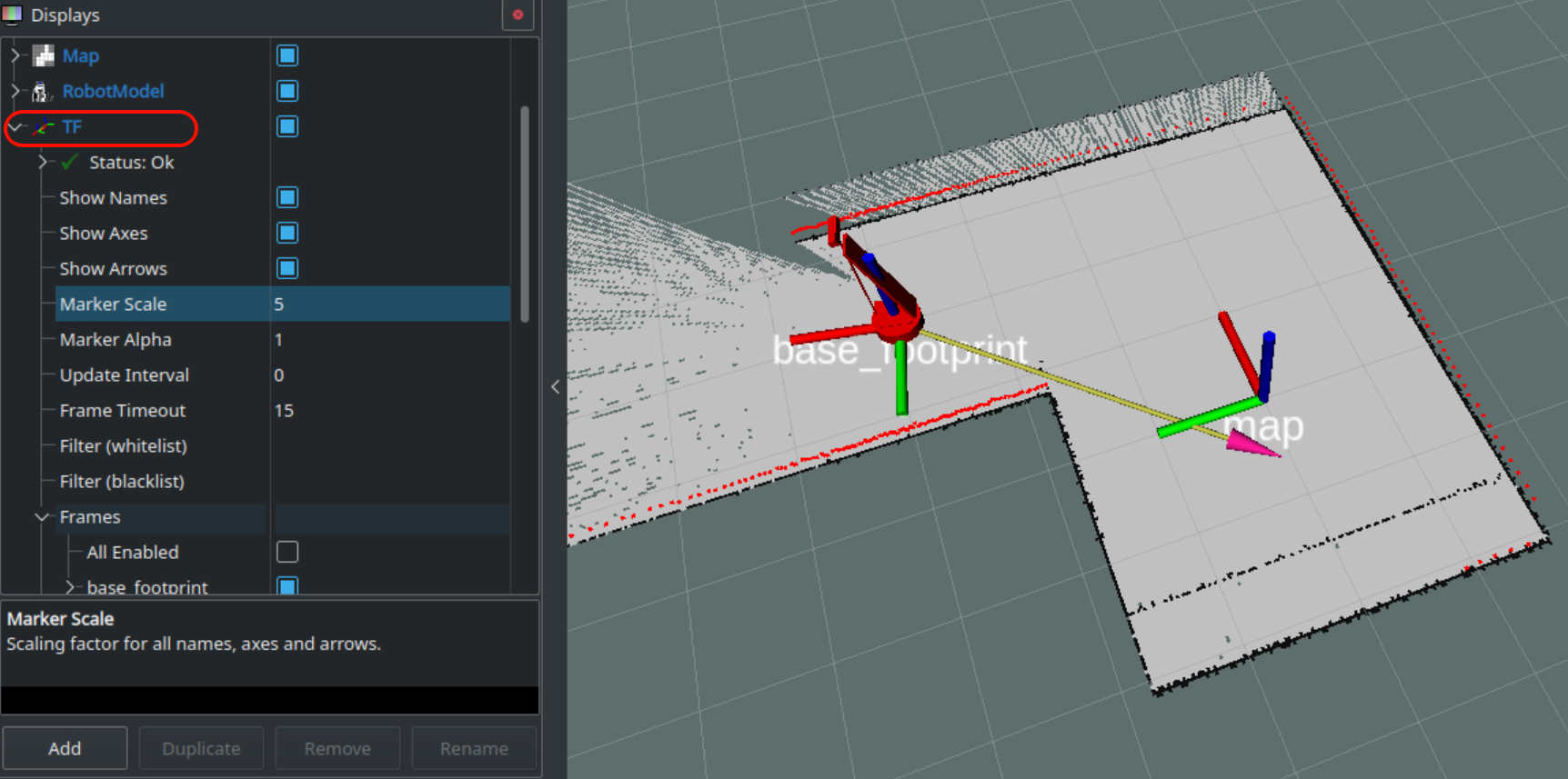
1.2 查看TF树
rosrun rqt_tf_tree rqt_tf_tree
| ##container## |
|---|
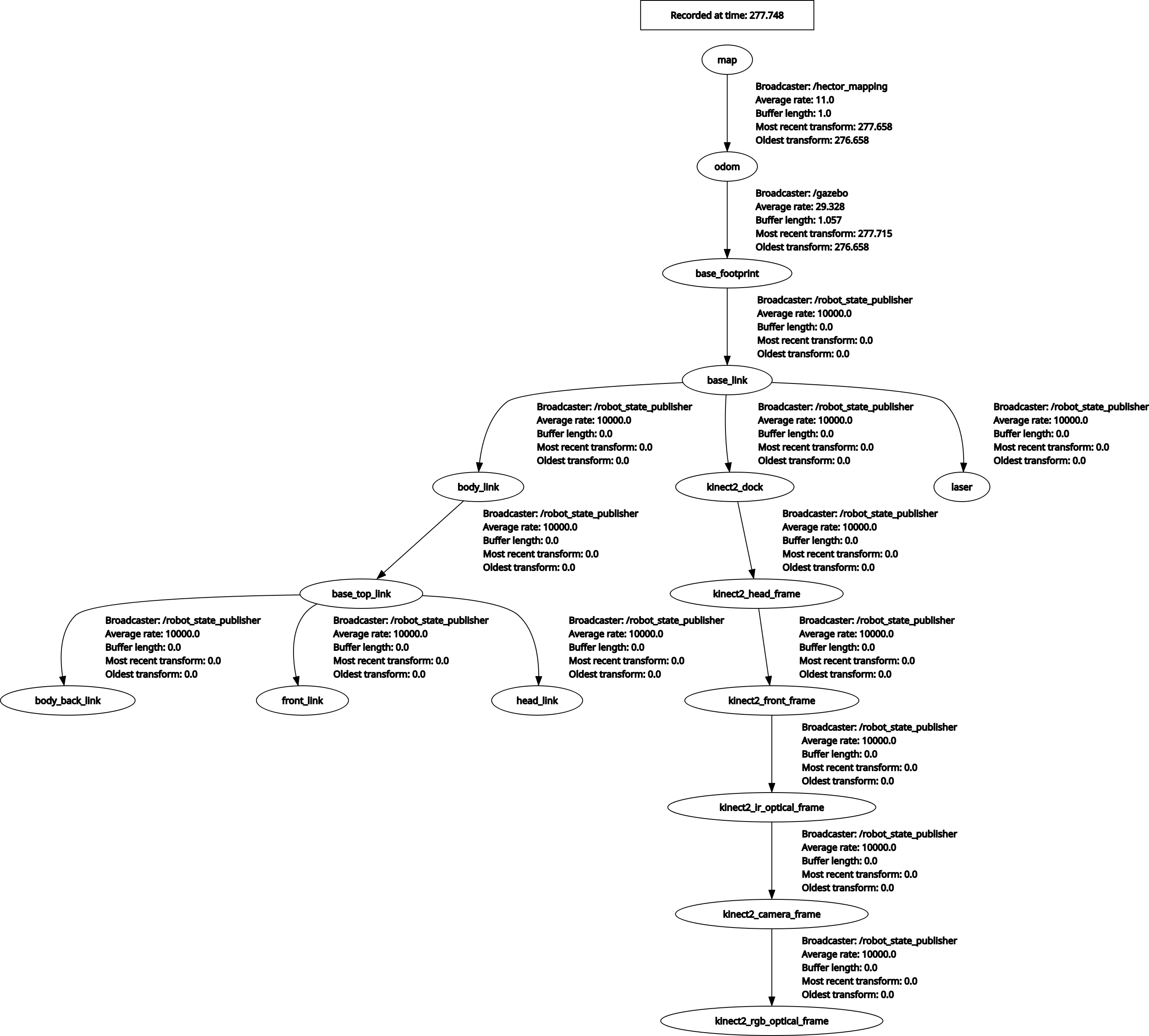 |
| TF树 |
2. 里程计
运行这个:
roslaunch wpr_simulation wpb_corridor_hector.launch
| ##container## |
|---|
 |
| 因为墙壁过于平滑(没有特征), 因此这种建图方式无法正确运用 |
现在我们尝试一种新的建图方式:
roslaunch wpr_simulation wpb_corridor_gmapping.launch
发现这样就正常了!
这是因为Gmapping使用了里程计, 虽然四周的内容没有发生变化(没有特别的参照物), 但是我们可以确定我们的轮子是在动的! 这样就可以通过一些数学上的算法 (时间 / 轮子转速 / 轮子周长) 来计算出移动的距离, 以辅助雷达扫描. (为什么是辅助呢? 是因为轮子也会由于某些不可抗力因素打滑什么的)
更深层次的, 从TF上讨论它们的区别的, 请看 https://www.bilibili.com/video/BV1ih4y177QK/ (后半)
3. 如何使用Gmapping进行SLAM建图
使用Gmappin的先决条件:
-
雷达坐标系名称 -> base_link
-
base_link -> odom
-
/scan(话题)
3.1 确认是否满足使用Gmapping的条件
启动一个新的环境:
roslaunch wpr_simulation wpb_stage_robocup.launch
- 输入:
rostopic list
# 发现存在 `/scan`
- 查看
/scan内容, 确认雷达坐标系名称:
rostopic echo /scan --noarray
header:
seq: 2485
stamp:
secs: 516
nsecs: 807000000
frame_id: "laser" # 发现 雷达坐标系名称
angle_min: -3.141590118408203
angle_max: 3.141590118408203
angle_increment: 0.017501894384622574
time_increment: 0.0
scan_time: 0.0
range_min: 0.23999999463558197
range_max: 6.0
rosrun rqt_tf_tree rqt_tf_tree查看:
| ##container## |
|---|
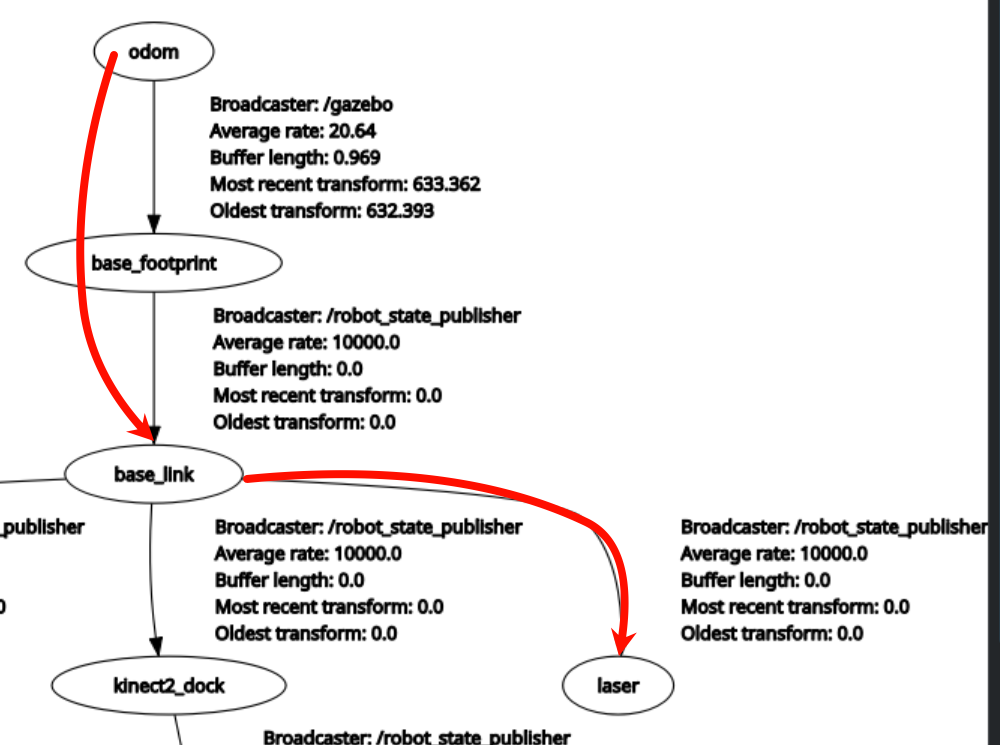 |
ok:
-
雷达坐标系名称("laser") -> base_link
-
base_link -> odom
3.2 启动Gmapping
rosrun gmapping slam_gmapping
启动 rviz:
rviz rviz
使用键盘控制机器人:
rosrun wpr_simulation keyboard_vel_ctrl
| ##container## |
|---|
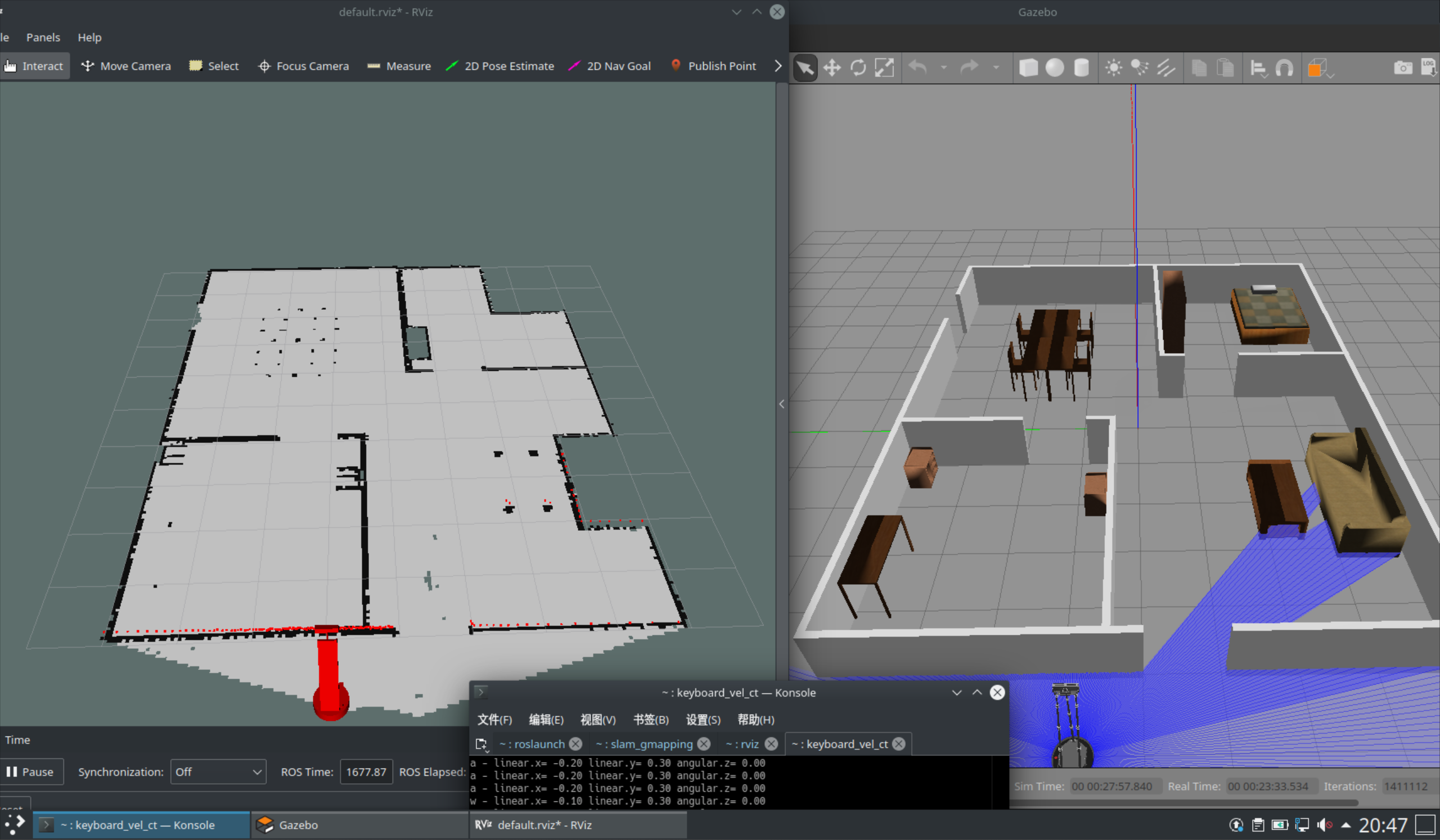 |
| 完成 |
4. 编写launch文件, 一键启动Gmapping建图
在之前的slam_pkg包下, 继续创建gmapping.launch配置文件:
<launch>
<include file="$(find wpr_simulation)/launch/wpb_stage_robocup.launch"/>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen"/>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find slam_pkg)/rviz/slam.rviz"/>
<node pkg="wpr_simulation" type="keyboard_vel_ctrl" name="keyboard_vel_ctrl"/>
</launch>
编译, 启动:
roslaunch slam_pkg gmapping.launch
5. Gmapping建图的参数设置
| ##container## |
|---|
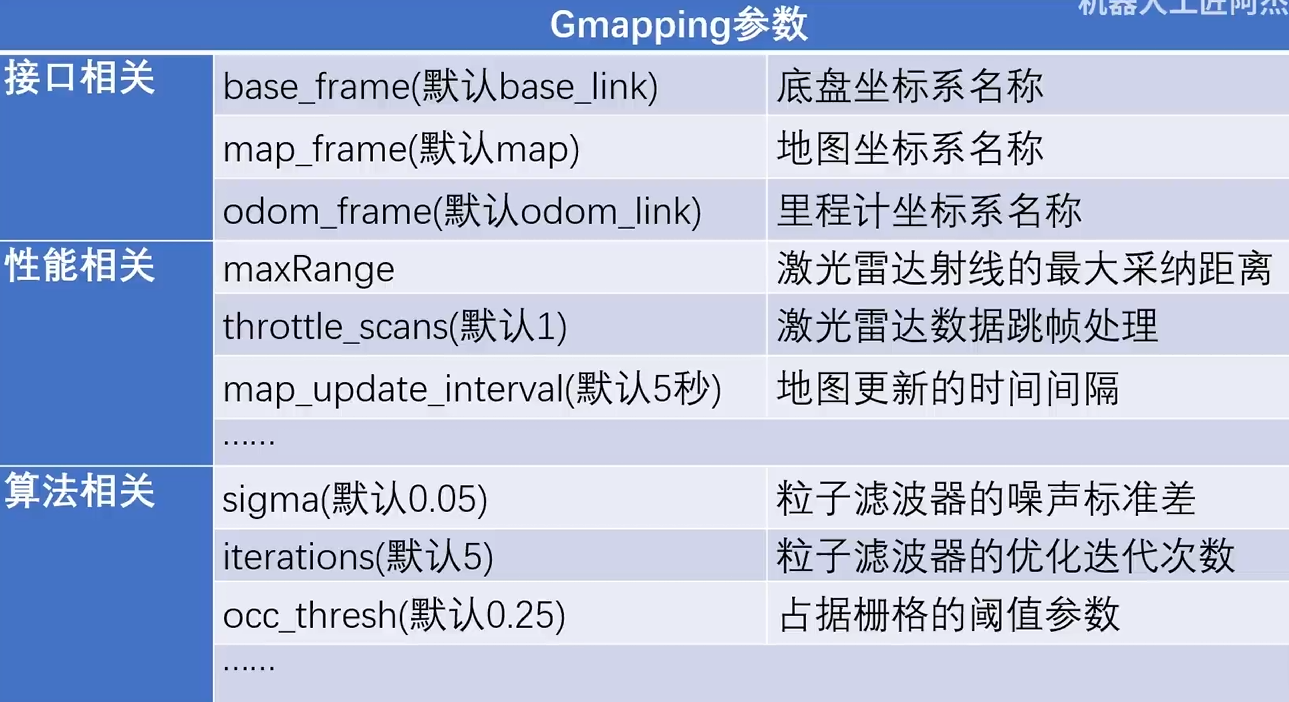 |
 |
使用同 011.SLAM与Hector_Mapping, 这里略...

