014.Navigation导航系统
1. 什么是Navigation导航系统
| ##container## |
|---|
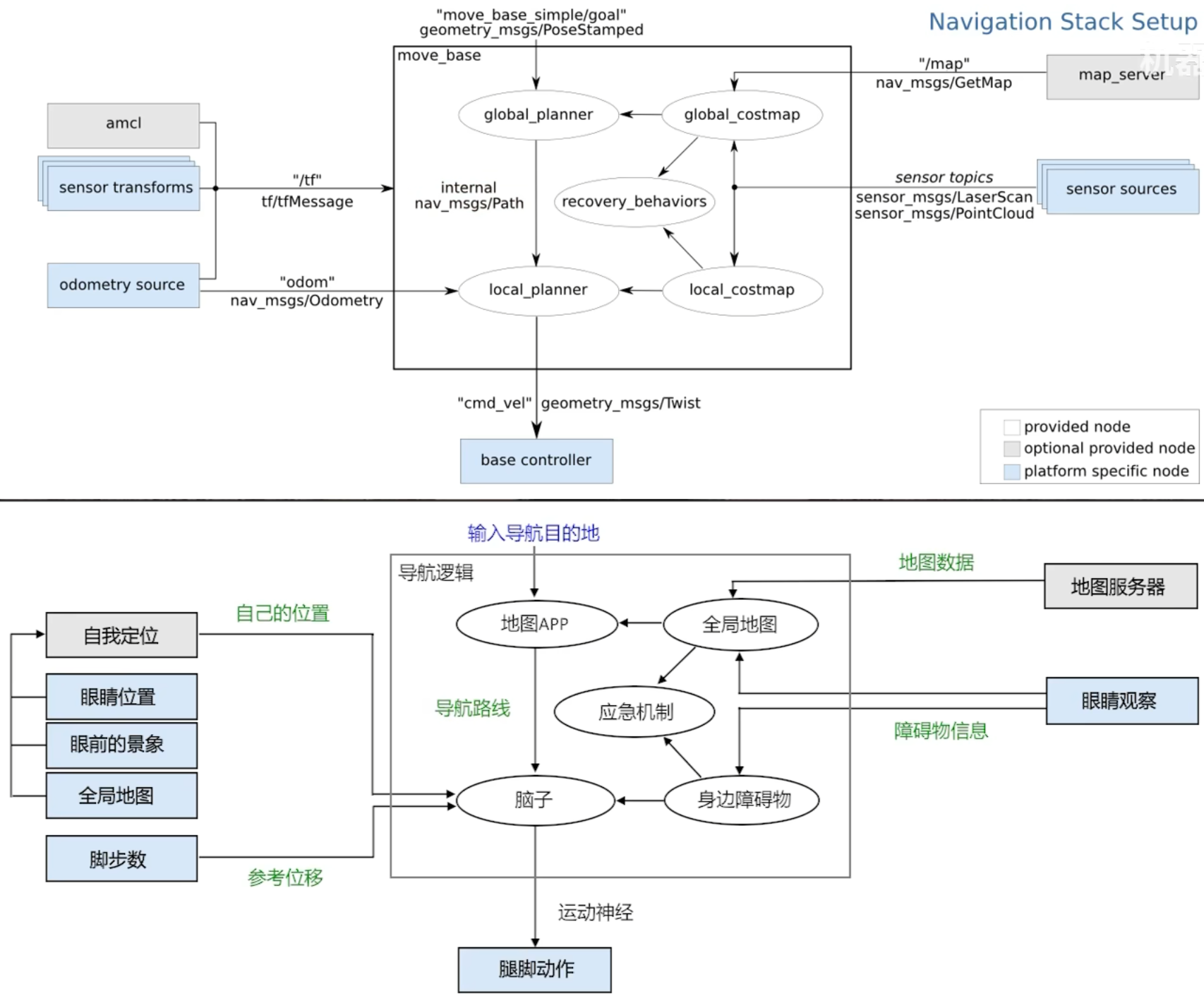 |
2. 使用Navigation导航系统
创建软件包:
catkin_create_pkg nav_pkg roscpp rospy move_base_msgs actionlib
复制之前的地图到maps文件夹, 然后编写nav.launch文件:
<launch>
<!--- Run move_base -->
<node pkg="move_base" type="move_base" name="move_base">
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" />
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<param name="base_local_planner" value="wpbh_local_planner/WpbhLocalPlanner" />
</node>
<!-- 加载地图 -->
<node pkg="map_server" type="map_server" name="map_server" args="$(find nav_pkg)/maps/map.yaml"/>
<!--- AMCL 定位节点 -->
<node pkg="amcl" type="amcl" name="amcl"/>
</launch>
然后启动rviz, 添加map, path, 并且选择话题, 然后通过2D Nav Goal来标注导航的目标点
| ##container## |
|---|
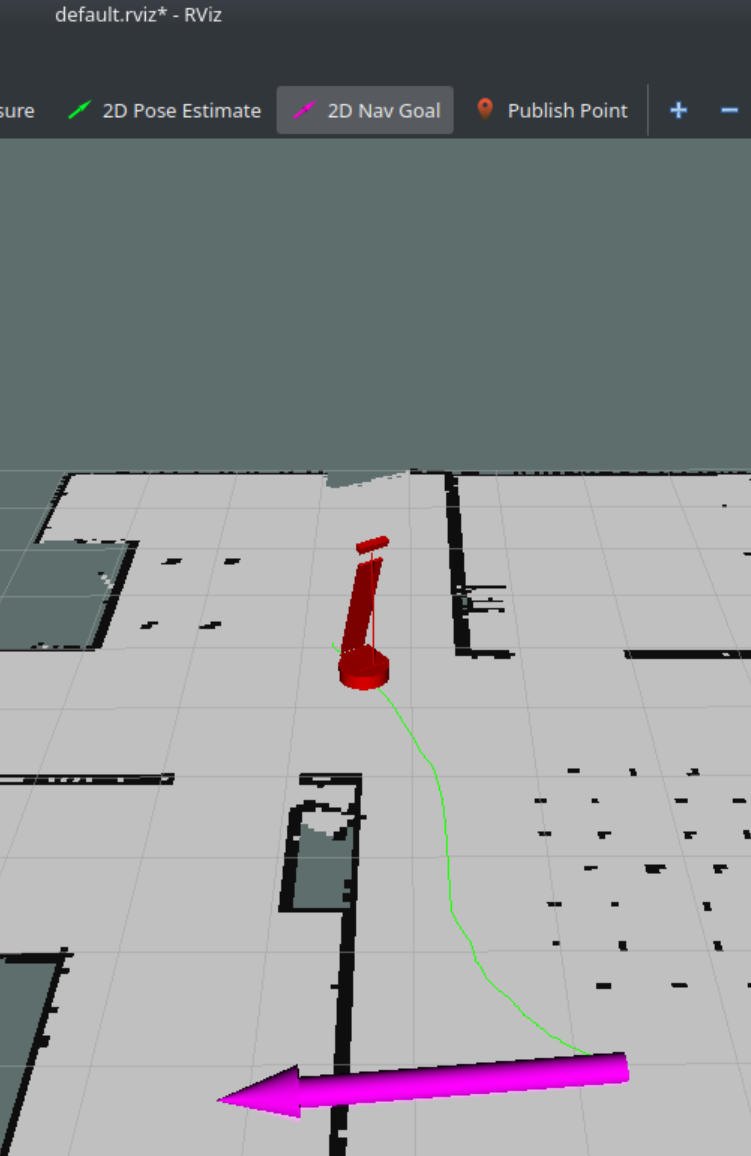 |
3. 全局规划器
move_base里面内置了两种导航算法, 一种是Dijkstra算法 (性能没有A*好, 但是是最优最短路, 曲线会更平滑), 还有一种就是A*算法
| ##container## |
|---|
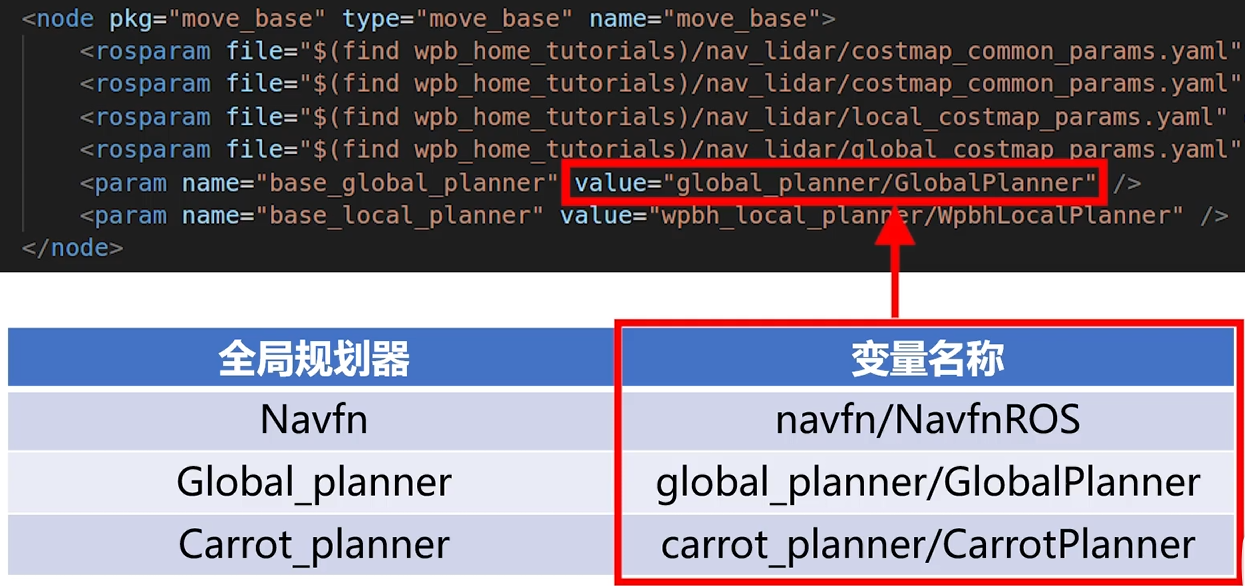 |
前两种是一样的, 都是包含了A*和Dijkstra算法(默认使用Dijkstra算法, 切换使用, 需要配置参数), 一般用第二个, 因为第一个它的A*算法有bug的说.
第三个, 多用于作为自定义规划器的代码模版来修改, 作用是: 从当前位置向目标点发射一条射线, 并且看射线上没有障碍物.
(如果是扫地机器人/赛车比赛等才可以自定义全局规划器, 其他的默认的3个规划器已经可以满足了)
4. AMCL 定位算法
文字说明比较麻烦, 直接看: https://www.bilibili.com/video/BV1rt421t76q/
| ##container## |
|---|
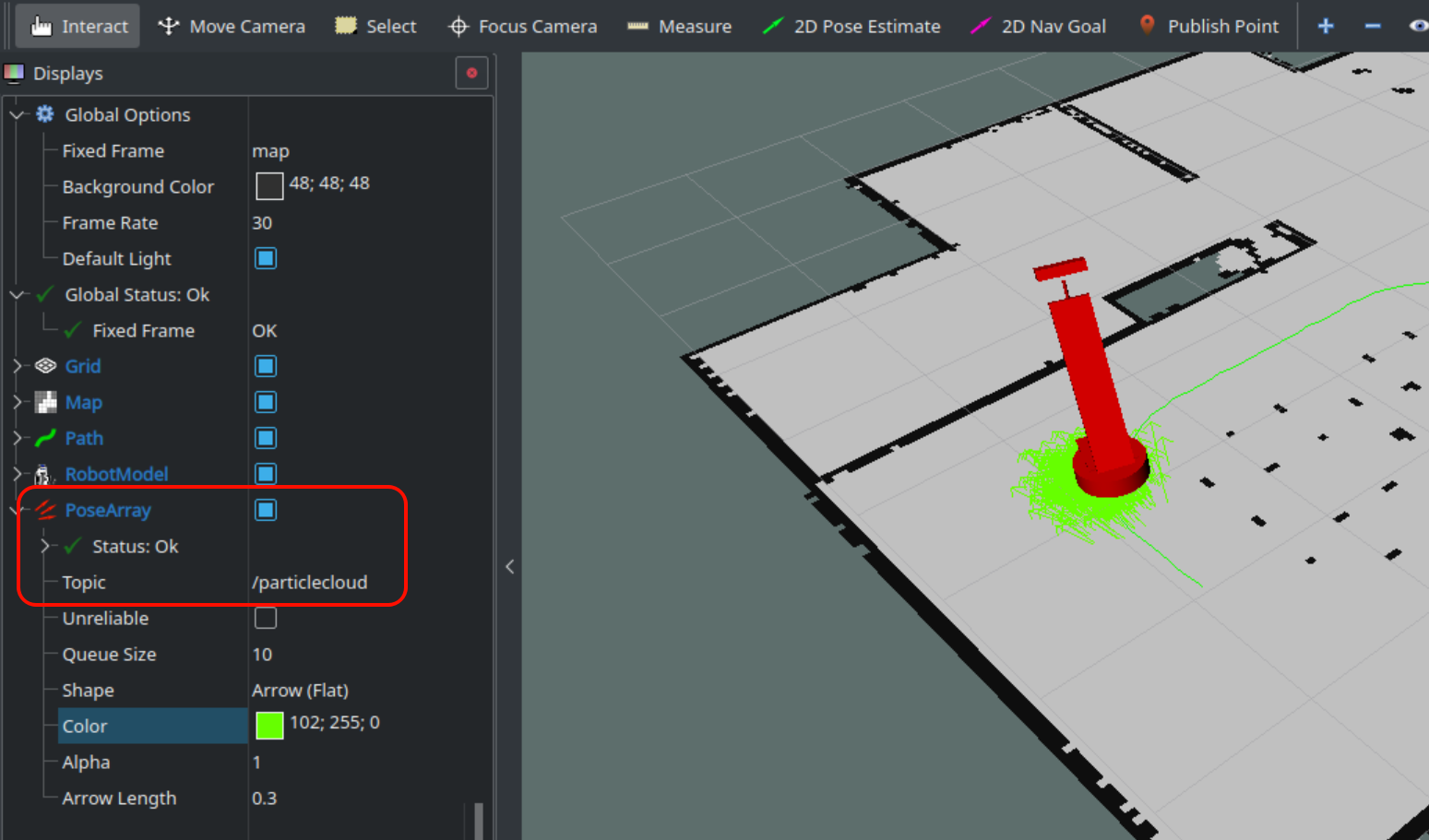 |
| 查看粒子云 |
5. 代价地图 Costmap
代价地图, 平衡机器人的碰撞体积, 以防止直接贴着墙走.
| ##container## |
|---|
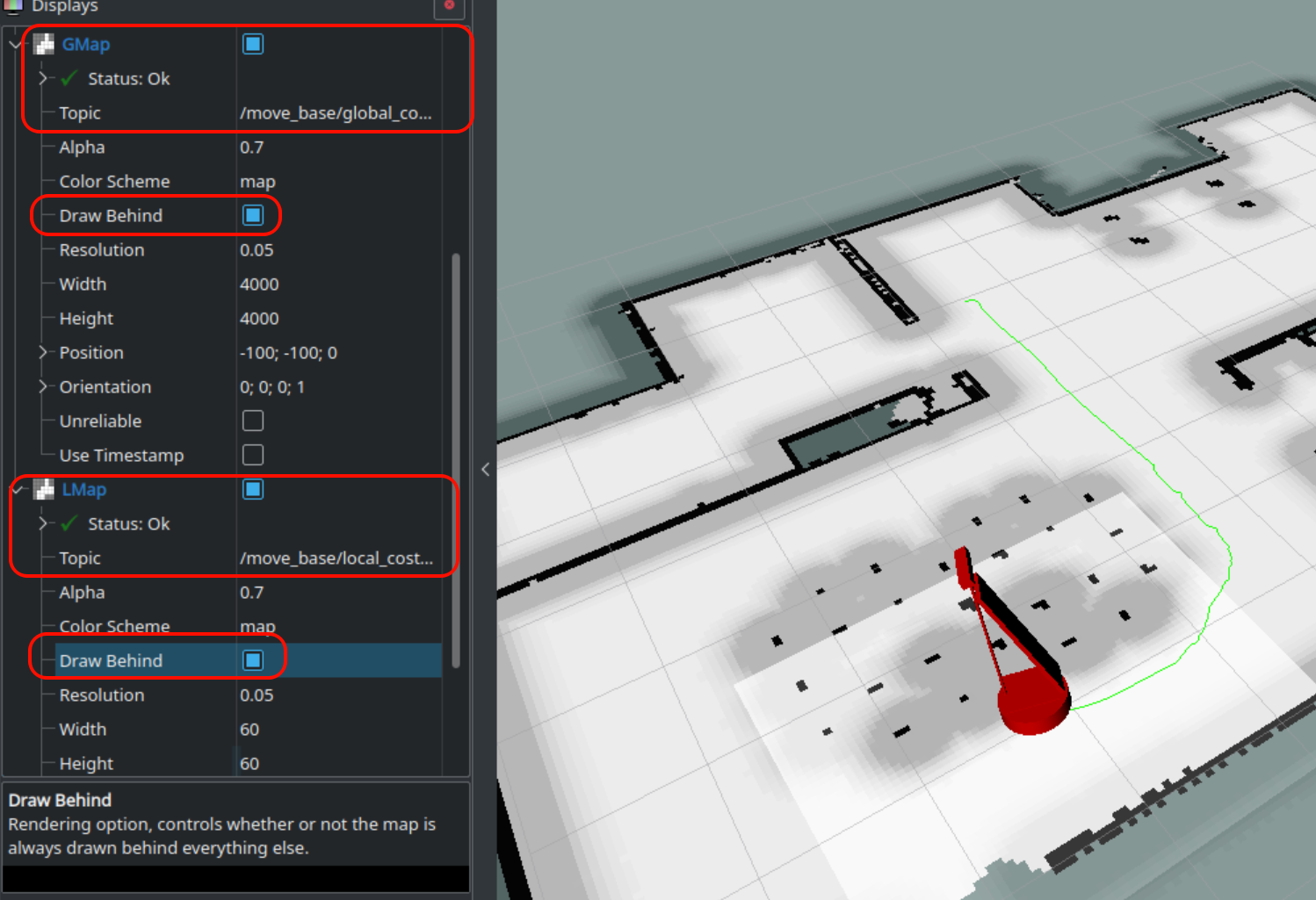 |
| 显示代价地图 |
顺便保存一下配置, 然后再在.launch里面配置.
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find nav_pkg)/rviz/ghMap.rviz"/>
5.1 代价地图的参数设置
咱们来看看这几个文件:
<node pkg="move_base" type="move_base" name="move_base">
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" />
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<param name="base_local_planner" value="wpbh_local_planner/WpbhLocalPlanner" />
</node>
$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml:
robot_radius: 0.25 # 机器人半径,单位为米,影响成本图中障碍物的检测范围。
inflation_radius: 0.5 # 膨胀半径,单位为米,用于在障碍物周围增加缓冲区,以避免碰撞。
obstacle_range: 1.0 # 障碍物检测范围,单位为米,超出此范围的障碍物不会被检测。
raytrace_range: 6.0 # 射线追踪范围,单位为米,限制激光扫描的有效距离。
observation_sources: base_lidar # 使用的观察源,定义传感器数据源。
base_lidar: { # 激光雷达配置
data_type: LaserScan, # 数据类型,表示使用激光扫描数据。
topic: /scan, # 订阅的主题名称,激光数据将从此主题获取。
marking: true, # 是否进行标记,表示激光数据是否在成本图中标记障碍物。
clearing: true # 是否进行清除,表示如果激光数据未检测到障碍物时,是否清除成本图中的障碍物。
}
Tip
为什么有两个, 却都是用同一个配置? 是为了方便调整一个配置, 就可以同时应用到global_costmap和local_costmap上 (防止奇怪的联动bug)
$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml:
global_costmap: # 全局成本图配置
global_frame: map # 全局坐标系,通常是地图坐标系。
robot_base_frame: base_footprint # 机器人底盘框架,用于成本图中的机器人的位置表示。
static_map: true # 是否使用静态地图,若为真则使用预定义的地图。(否则为边建图边导航)
update_frequency: 1.0 # 更新频率,单位为赫兹,每秒更新一次成本图。
publish_frequency: 1.0 # 发布频率,单位为赫兹,每秒发布一次成本图。
transform_tolerance: 1.0 # 坐标转换容忍度,单位为秒,允许的延迟时间。
$(find wpb_home_tutorials)/nav_lidar/local_costmap_params.yaml:
local_costmap: # 局部成本图配置
global_frame: odom # 全局坐标系,通常是里程计坐标系。
robot_base_frame: base_footprint # 机器人底盘框架,用于成本图中的机器人的位置表示。
static_map: false # 是否使用静态地图,若为假则使用动态生成的地图。
rolling_window: true # 是否启用滚动窗口,允许成本图根据机器人的位置动态调整。
width: 3.0 # 成本图的宽度,单位为米。
height: 3.0 # 成本图的高度,单位为米。
update_frequency: 10.0 # 更新频率,单位为赫兹,每秒更新十次成本图。(一般设置为雷达的扫描频率)
publish_frequency: 10.0 # 发布频率,单位为赫兹,每秒发布十次成本图。
transform_tolerance: 1.0 # 坐标转换容忍度,单位为秒,允许的延迟时间。
- 更多参数: https://index.ros.org/p/costmap_2d/github-ros-planning-navigation/#noetic 的 wiki: http://wiki.ros.org/costmap_2d
6. 恢复行为 | Recovery Behaviors
| ##container## |
|---|
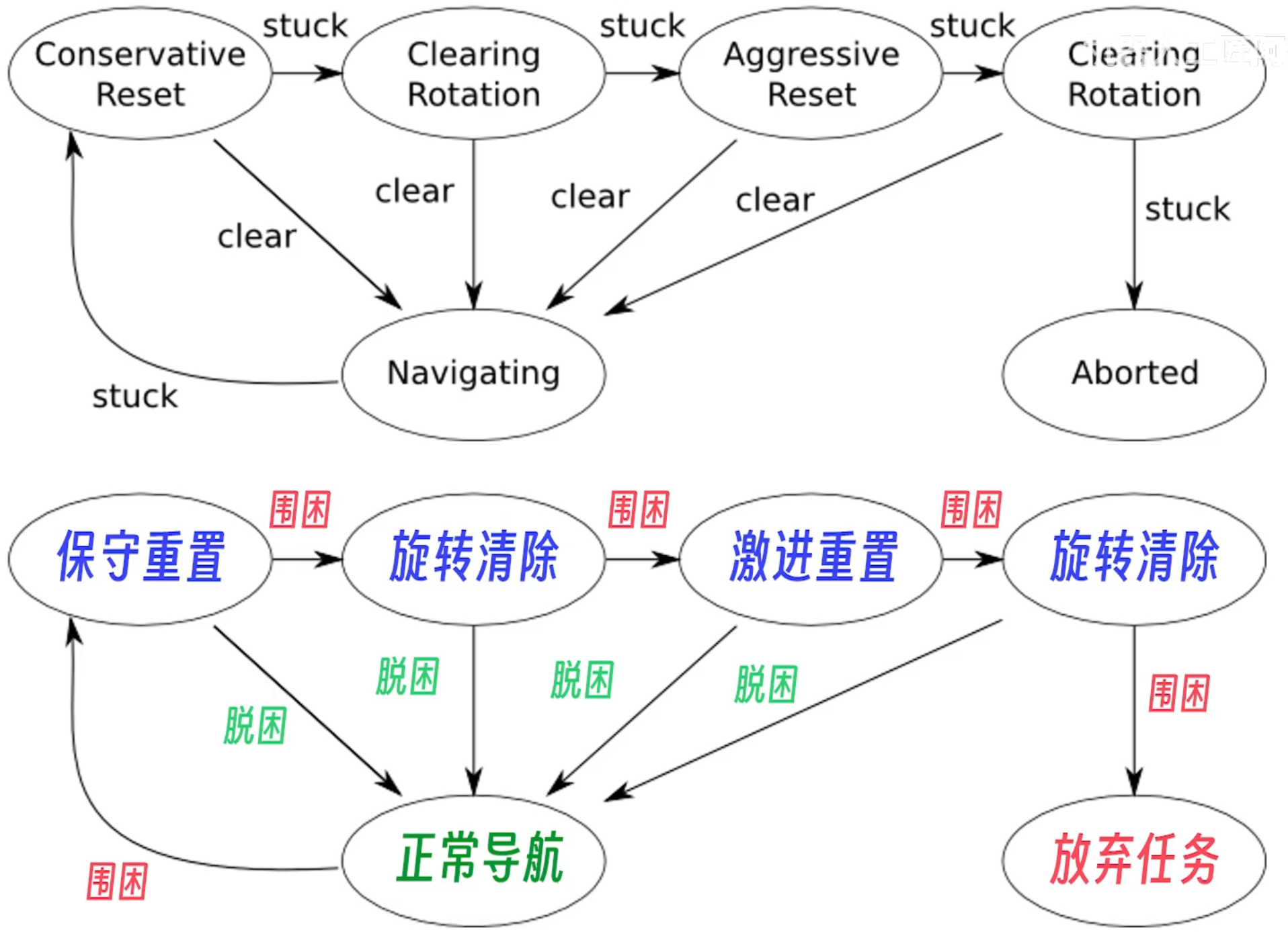 |
简单地说就是如果你的雷达不是360度扫描的, 或者某些情况看不见后方, 导致没有更新后面的状态; 而此时前方的路被挡住了, 就会尝试清除地图重新规划路线/旋转重新局部建图..
当然这个过程我们也是可以自定义的..
6.1 恢复行为的参数设置
继续看:
$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml:
recovery_behaviors: # 恢复行为列表
- name: 'conservative_reset' # 温和重置行为的名称
type: 'clear_costmap_recovery/ClearCostmapRecovery' # 行为类型,清除成本图的恢复方式。
- name: 'rotate_recovery' # 旋转恢复行为的名称
type: 'rotate_recovery/RotateRecovery' # 行为类型,进行旋转以寻找路径。
- name: 'aggressive_reset' # 激进重置行为的名称
type: 'clear_costmap_recovery/ClearCostmapRecovery' # 行为类型,清除成本图的恢复方式。
conservative_reset: # 温和重置的具体配置
reset_distance: 2.0 # 重置距离,单位为米,若机器人移动超过此距离则重置成本图。
layer_names: ["obstacle_layer"] # 需要重置的图层名称,通常为障碍物层。
aggressive_reset: # 激进重置的具体配置
reset_distance: 0.0 # 重置距离,单位为米,立即重置成本图。
layer_names: ["obstacle_layer"] # 需要重置的图层名称,通常为障碍物层。
recovery_behaviors以自定义恢复行为
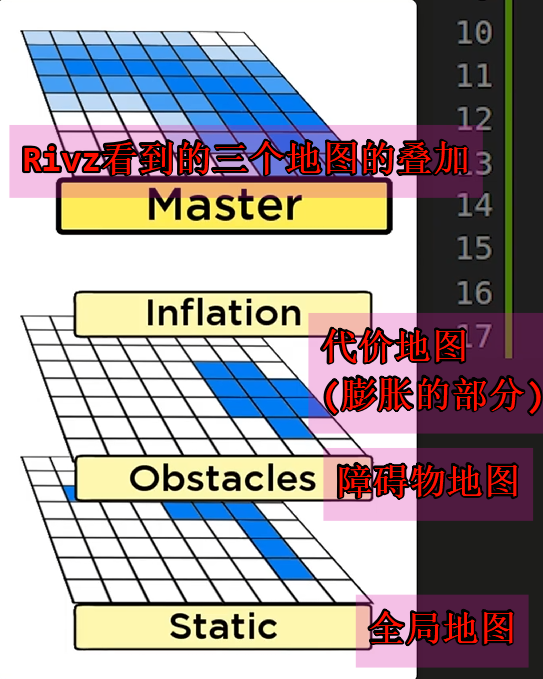
附, 地图的分层:
| ##container## |
|---|
 |

