009.标准信息与使用自定义消息类型
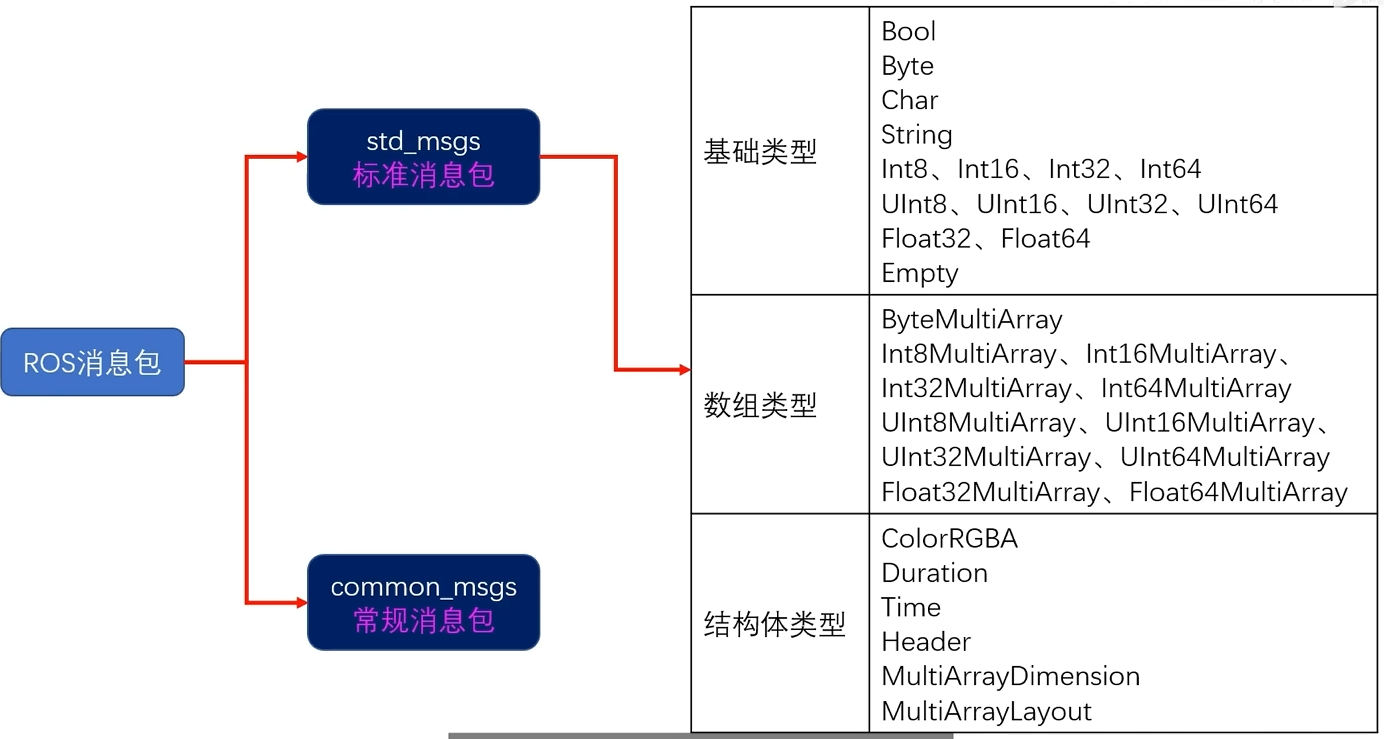
1. 标准消息包 std_msgs
| ##container## |
|---|
 |
2. 常用消息包 common_msgs
| ##container## |
|---|
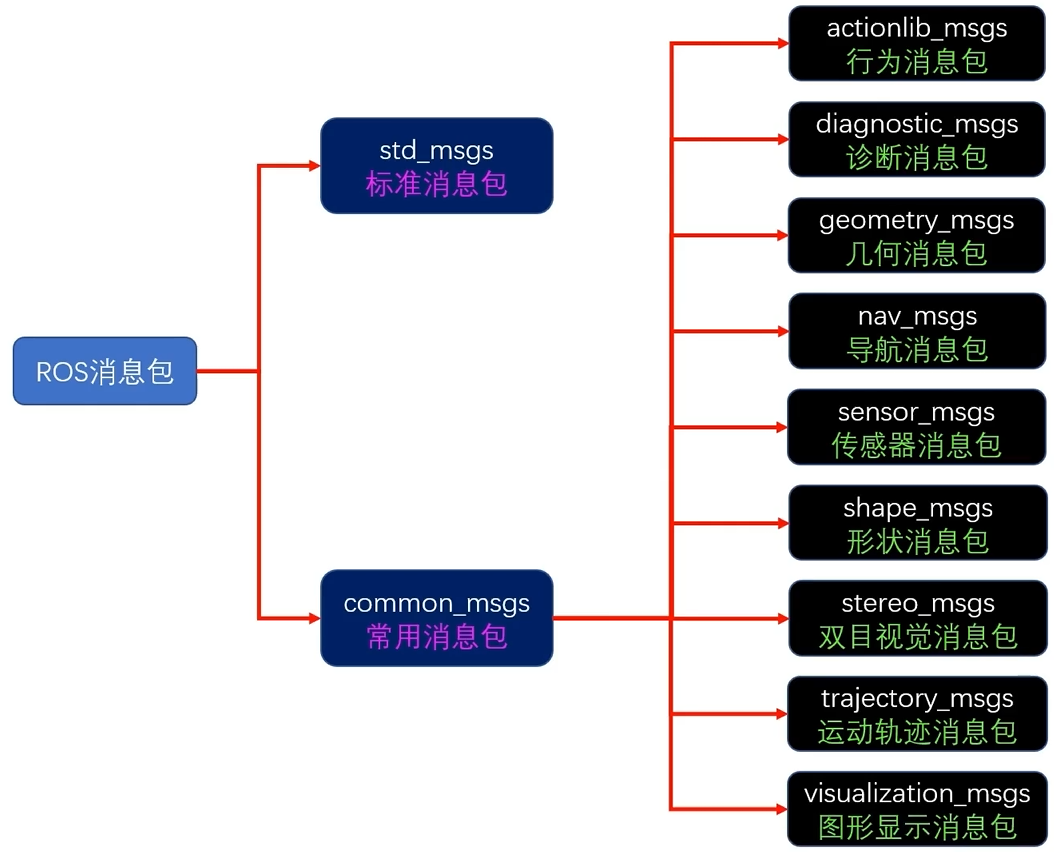 |
以下介绍两个常用的包
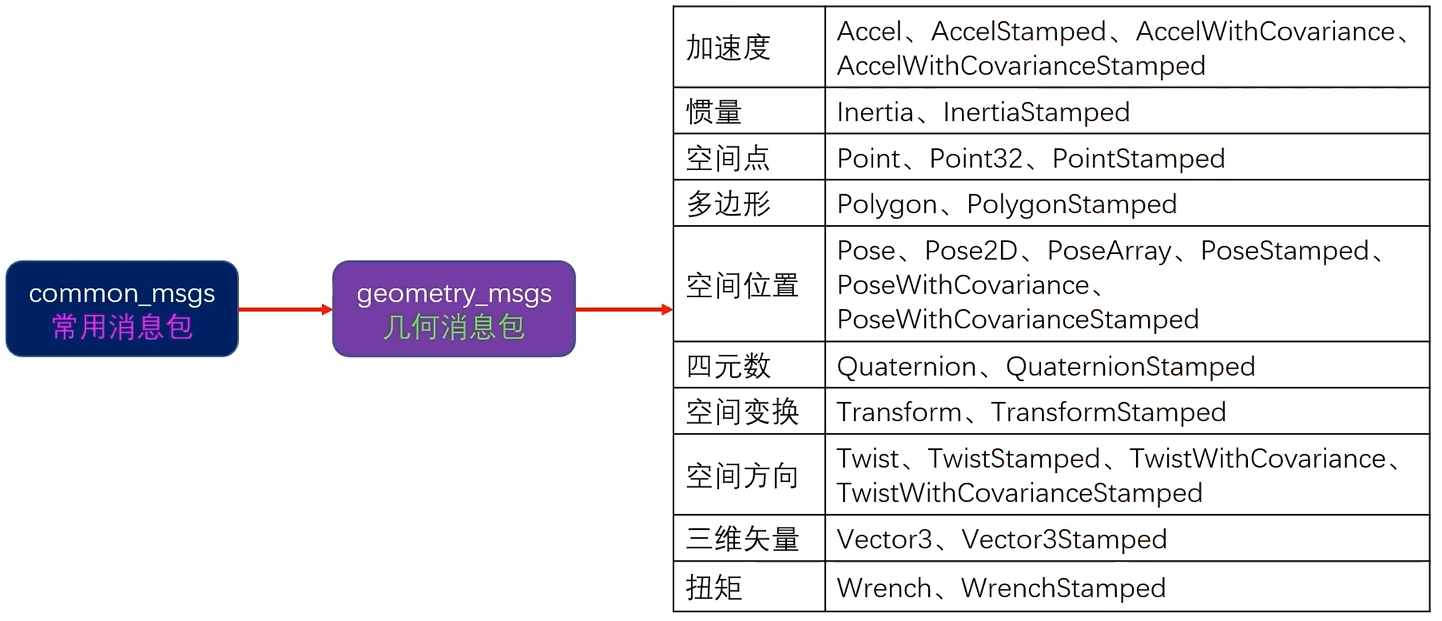
2.1 几何包 geometry_msgs
| ##container## |
|---|
 |
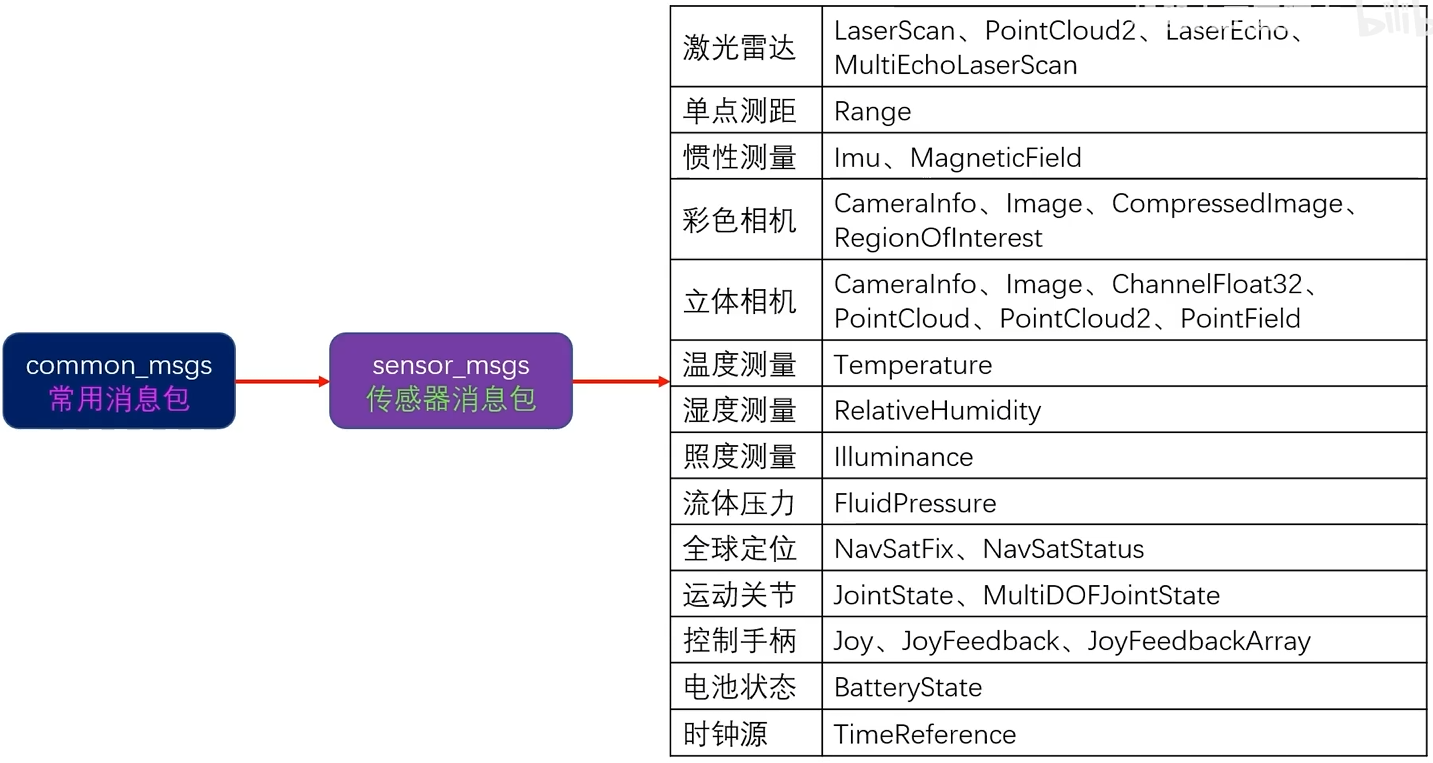
2.2 传感器包 sensor_msgs
| ##container## |
|---|
 |
3. 生成自定义消息类型
- 建包 (消息一般以
_msgs结尾)
catkin_create_pkg qq_msgs roscpp rospy std_msgs message_generatio
n message_runtime
- 在工作目录创建文件夹
msg, 并创建.msg文件
qq_msgs
├── CMakeLists.txt
├── include
│ └── qq_msgs
├── msg
│ └── Carry.msg # 这个
├── package.xml
└── src
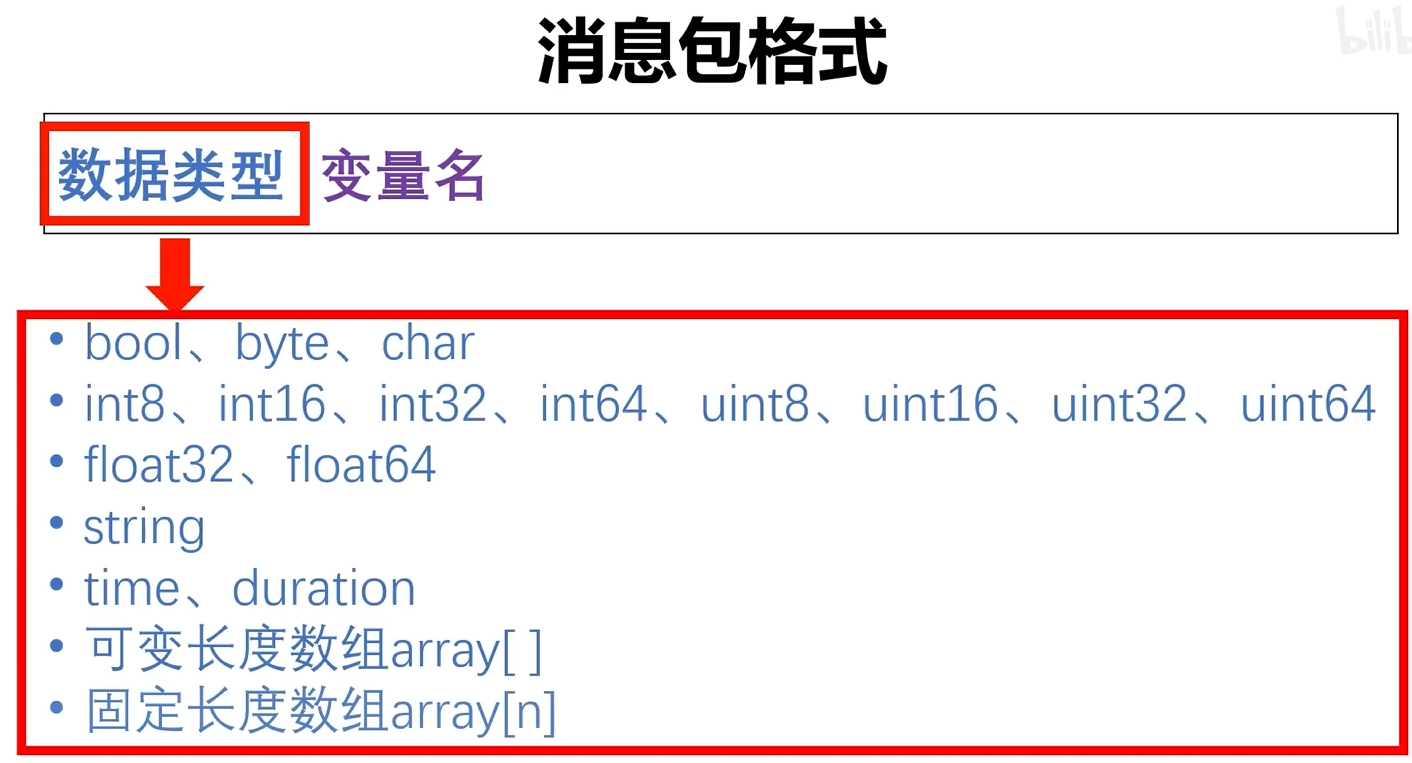
- 编写内容: 类似于(Protobuf使用)
string name
int64 id
string data
| ##container## |
|---|
 |
- 编译
- 确保cmake从上到下有以下内容:
find_package(catkin REQUIRED COMPONENTS
message_generation
message_runtime
roscpp
rospy
std_msgs
)
add_message_files(
FILES
Carry.msg
)
# 这句表面新的消息类型需要依赖的其他消息类型列表
generate_messages(
DEPENDENCIES
std_msgs
)
# 注意检查 message_runtime 是否存在, 没有就补上
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES qq_msgs
CATKIN_DEPENDS message_generation message_runtime roscpp rospy std_msgs
# DEPENDS system_lib
)
# ... 剩下的就不用动 (默认即可)
- .xml 中
确保有下面一对
<build_depend>message_generation</build_depend>
<build_depend>message_runtime</build_depend>
<exec_depend>message_generation</exec_depend>
<exec_depend>message_runtime</exec_depend>
然后编译: catkin_make
4. 在ROS中使用C++自定义消息类型
- 修改 之前的发布者的代码
#include <ros/ros.h>
#include <std_msgs/String.h>
#include <qq_msgs/Carry.h>
int main(int argc, char *argv[]) {
ros::init(argc, argv, "chao_node");
ros::NodeHandle nh;
ros::Publisher pub = nh.advertise<qq_msgs::Carry>("HX_Home", 16);
ros::Rate loop_rete(10); // 控制循环每秒执行的次数
int i = 0;
while (ros::ok()) { // 如果 ctrl + c 无法退出, 就换成 ros::ok()
printf("输出 %d\n", ++i);
qq_msgs::Carry msg;
msg.name = "张三";
msg.id = 114514;
msg.data = "你好啊, 我是 " + std::to_string(i);
pub.publish(msg); // 发送消息
loop_rete.sleep();
}
return 0;
}
- 修改cmake,
find_package中添加qq_msg, 并添加add_dependencies,
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
qq_msgs # 添加这个, 并且在末尾 (按照顺序编译的)
)
add_executable(chao_node src/chao_node.cpp)
# 添加依赖项
add_dependencies(chao_node qq_msgs_generate_messages_cpp)
target_link_libraries(chao_node
${catkin_LIBRARIES}
)
- 修改
.xml, 添加以下内容:
<build_depend>qq_msgs</build_depend>
<exec_depend>qq_msgs</exec_depend>
然后编译即可 (另一个订阅者修改同上)

