004.实现机器人运动控制
- 新建项目
catkin_create_pkg vel_pkg rospy roscpp geometry_msgs
- 代码
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char *argv[]) {
ros::init(argc, argv, "vel_node");
ros::NodeHandle nh;
// 向`cmd_vel`主题发送`geometry_msgs::Twist`速度消息
// 约定俗成`cmd_vel`用于发布机器人的速度指令
ros::Publisher vel_pub = nh.advertise<geometry_msgs::Twist>("/cmd_vel", 10);
geometry_msgs::Twist vel_msg;
// === 矢量速度 m/s ===
vel_msg.linear.x = 0.1;
vel_msg.linear.y = 0;
vel_msg.linear.z = 0;
// === 旋转速度 弧度/s ===
vel_msg.angular.x = 0;
vel_msg.angular.y = 0;
vel_msg.angular.z = 0;
ros::Rate r(30);
while (ros::ok()) {
vel_pub.publish(vel_msg);
r.sleep();
}
return 0;
}
注: 方向
| ##container## |
|---|
 |
| 右手打枪手势建系 |
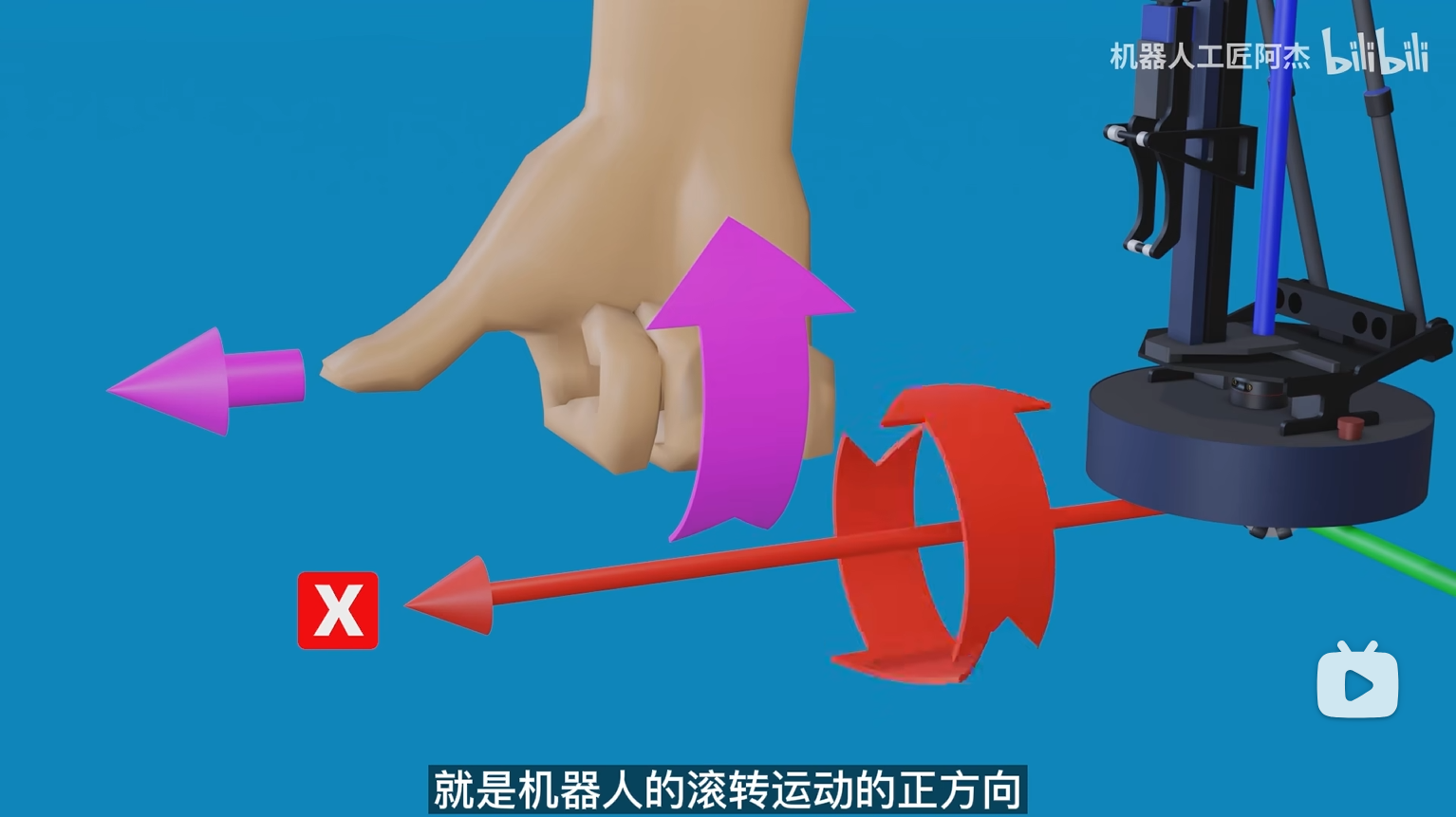 |
| 其他的同理: 右手螺旋, 大拇指指向坐标轴正方向, 四指方向即为滚动正方向 |
- 启动
roslaunch wpr_simulation wpb_simple.launch
rosrun vel_pkg vel_node

