013.如何在ROS中保存和加载地图
作用: 将当前的地图保存到磁盘里面, 用于加载.
1. 保存地图
启动环境:
roslaunch slam_pkg gmapping.launch
建好图后, 保持建图状态, 保存:
rosrun map_server map_saver -f <保存文件的名称>
如: rosrun map_server map_saver -f map
然后就会在当前目录生成下面两个文件:
| ##container## |
|---|
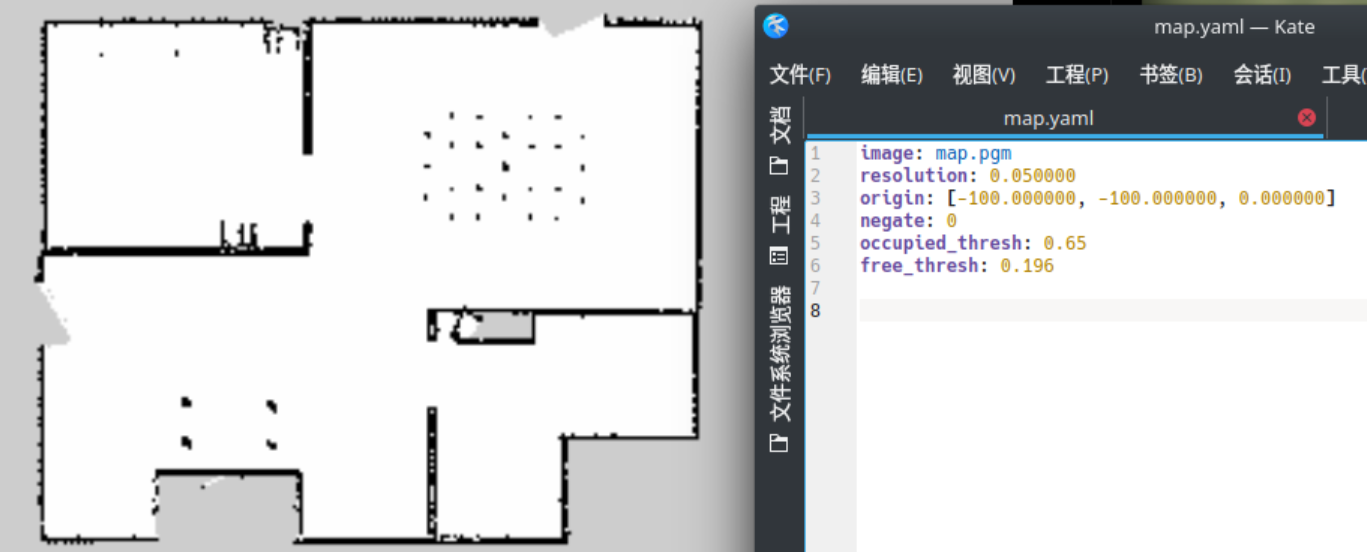 |
image: map.pgm # 地图文件
resolution: 0.050000 # 地图像素大小 (0.05 m)
origin: [-100.000000, -100.000000, 0.000000] # 地图的左下角坐标; 以及相对于map坐标系的旋转偏转角
# 剩下3个参数一般不用修改
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196
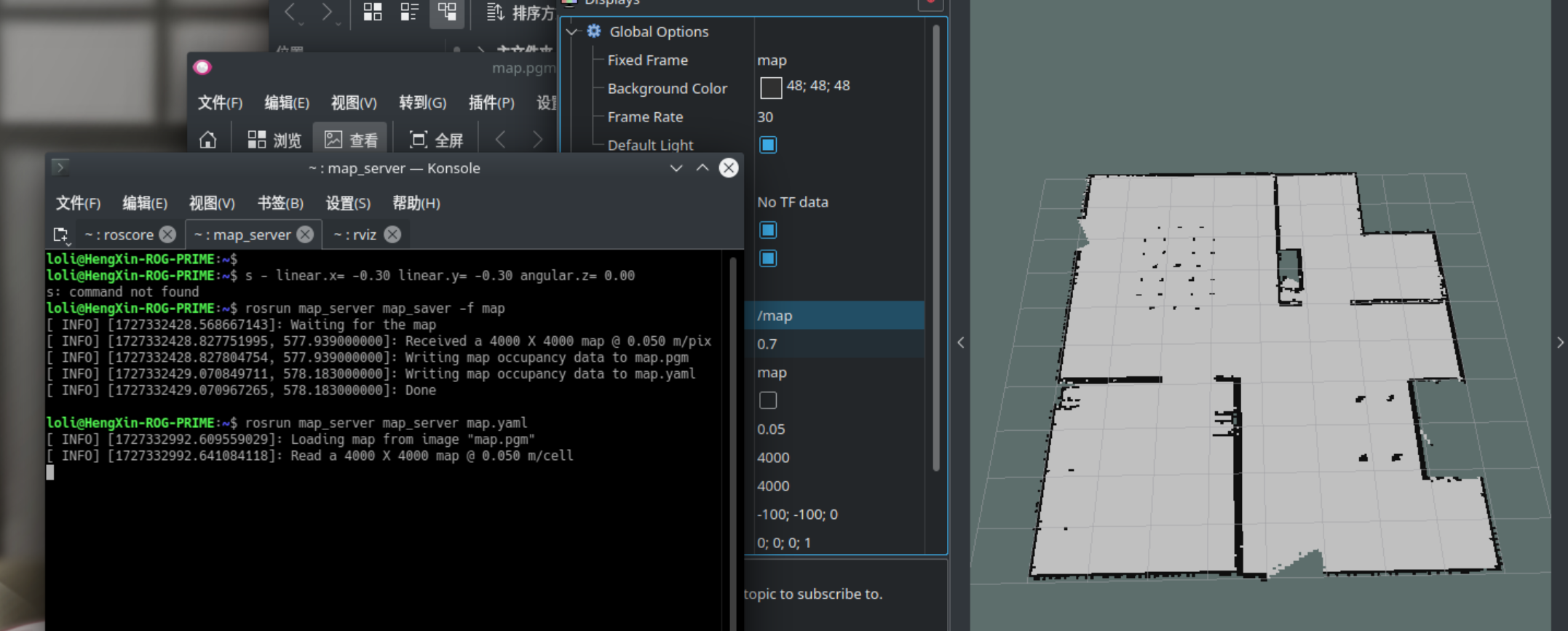
2. 加载地图
-
roscore启动 -
加载地图
rosrun map_server map_server map.yaml(会自动找到对应的.pgm文件) -
通过
rviz查看地图
rosrun map_server map_server <地图文件>.yaml
| ##container## |
|---|
 |

