index
- 如果在rosdep连接超时的问题,在终端程序中依次执行如下三条指令:
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep
如果第二条卡住了:
-
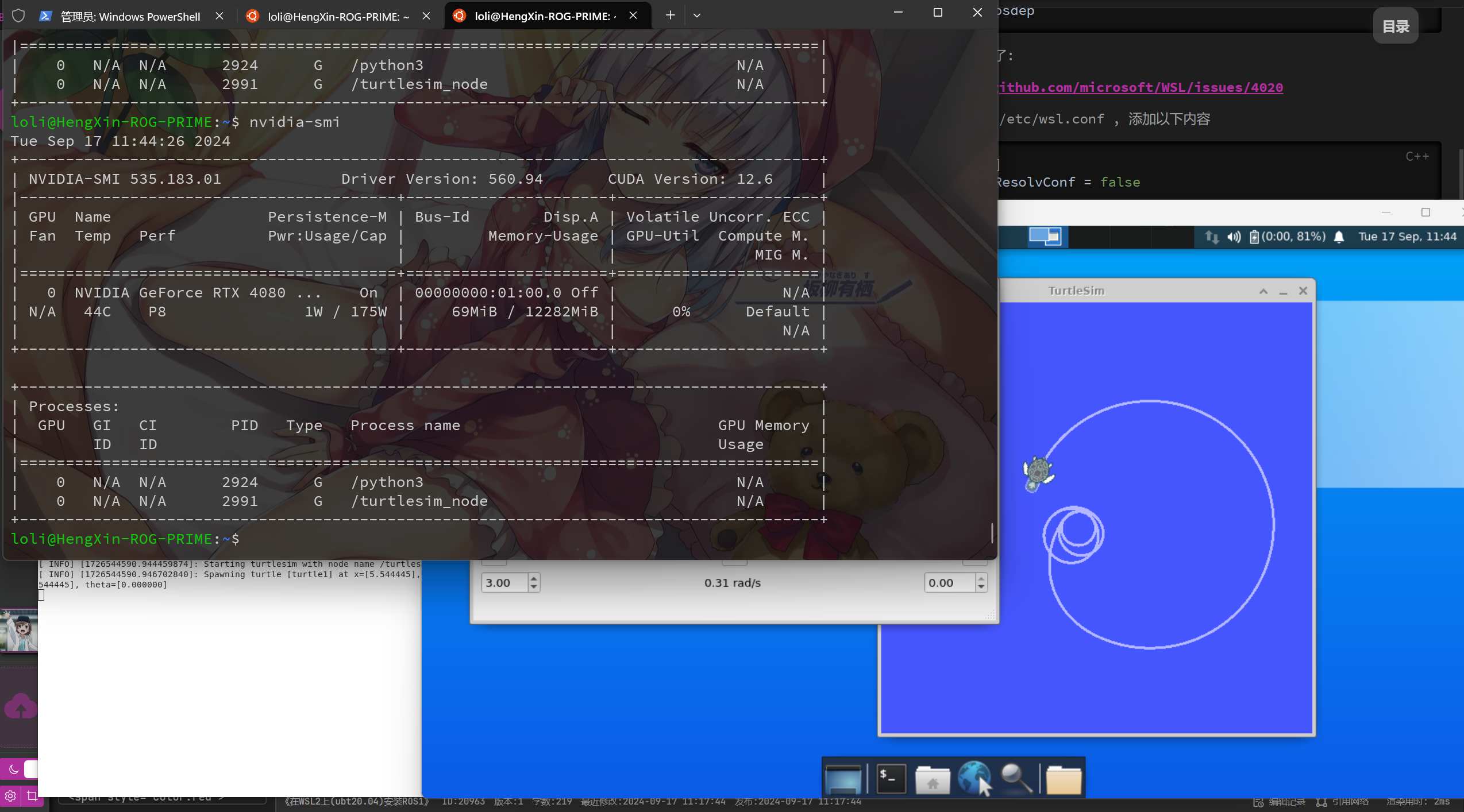
sudo vim /etc/wsl.conf , 添加以下内容
[network]
generateResolvConf = false
- sudo vim /etc/resolv.conf , 添加以下内容
# This file was automatically generated by WSL. To stop automatic generation of this file, add the following entry to /etc/wsl.conf:
# [network]
# generateResolvConf = false
nameserver 1.1.1.1
nameserver 8.8.8.8
nameserver 8.8.4.4
nameserver 172.23.0.1
并且关闭防火墙! <-- 重中之重
启动小乌龟测试:
控制台A: 启动ROS核心
roscore
控制台B: 启动方向盘
rosrun rqt_robot_steering rqt_robot_steering
控制台C: 启动乌龟
rosrun turtlesim turtlesim_node
最终, 可以看到, GPU有运行他们:
| ##container## |
|---|
 |

